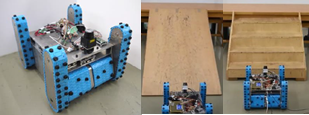
山崎先生-図1 公開日時:2016年4月20日 | 309 × 115 (自律走行レスキューロボットの開発 ~障害物走行時の傾斜補正と熱源検出~(機械工学系 山崎芳明)) 図1 レスキューロボットMeisei RescueMk-5 胴体部と4つのレッグ部で構成 自律坂走行と階段走行の模様