自律走行レスキューロボットの開発
~障害物走行時の傾斜補正と熱源検出~
整理番号:2016-032

研究者名: 山崎 芳明(Yoshiaki Yamazaki)
所 属: 理工学部 総合理工学科 機械工学系 教授
専門分野:ロボット工学、機械力学・制御、知能機械学・機械システム
キーワード: レスキューロボット、自律走行、障害物検出、熱源検出
研究概要
震災が発生した際、救助活動には建物の倒壊や漏電といった2次災害の危険がある。また、震災による被害が広範囲に及ぶ場合、人出が足りなくなる。そこで、人の代わりにレスキューロボットを使うことで、被災の可能性を下げることができ、人手の補充もできるため、レスキューロボットの研究が進められている。我々は、そんなレスキューロボットの中で、屋内の被災者を探索する自律走行レスキューロボット(Meisei Rescue Mk)を開発している。Meisei Rescue Mk-5(図1)は、障害物を発見注)して識別し、障害物が階段か坂の場合、前進して、慣性センサ(IMU)により車体の傾きを計測し、フィードバック制御をかけて走行する。本技術を使うことにより、坂や階段の自動昇降アルゴリズムの有用性を実証した。
- 上り坂走行(傾斜25 ):IMUフィードバックなしでは曲がった(△)が、ありでは直進(○、図2左)
- 上り階段走行(傾斜35 ):IMUフィードバックなしでは曲がったが、ありでは若干右に曲がる(クローラの空回り)ものの登段達成(図2右)
- 瓦礫の中から要救助者を発見するため、焦電型赤外線センサ(背景との温度差と移動速度によって熱源を検出)を装着した探索型レスキューロボットも開発中
注):スキャニングレーザーレンジファインダー(環境情報を取得するセンサ)により、対象物にレーザを照射し、対象物までの距離を計測(サーボモーターと組み合わせ、3Dスキャンを行う)

図1 レスキューロボットMeisei RescueMk-5
胴体部と4つのレッグ部で構成自律坂走行と階段走行の模様
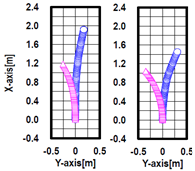
図2 走行軌跡 IMUフィードバック の有(○)無(△) 上り坂走行(左) 上り階段走行(右)
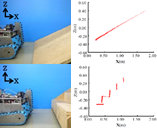
図3 2自由度3Dスキャン結果 上:上り坂走行時 下:上り階段走行時
応用例・用途
- 自律走行レスキューロボットにより、早期の被災者発見が可能となる。
- 各種のロボット開発技術に応用可能である。