宇宙エレベーターチャレンジ用クライマーの開発
~機構系と走行実験による各種センサ計測~
整理番号:2016-031

研究者名: 山崎 芳明(Yoshiaki Yamazaki)
所 属: 理工学部 総合理工学科 機械工学系 教授
専門分野:ロボット工学、機械力学・制御、知能機械学・機械システム
キーワード: 宇宙エレべーター
研究概要
宇宙エレベーターとは、地表から静止軌道を結ぶエレベーターのことで、全長が10万~14万kmにもなる巨大な建造物である。長い間夢物語とされていたが、カーボンナノチューブの発見により、強い引張強度を持つケーブルが作製できることが明らかとなり、宇宙エレベーター実現の可能性が見出され、注目されてきている。ケーブルを自動昇降するクライマーの機構・制御系の研究を行い、軽量・小型のメイセイスペースエレベーターⅠ(図1)を開発した。第4回宇宙エレベーター技術競技会(図2、静岡県富士宮市、2012年)で以下を達成した。
- 500 mの自動制御による自律昇降を達成した(第5回、2013年)。ベルトケーブルへの巻き付け角を大きく取れる交差ローラ方式及びトルク重量比の高いDCブラシレスモータを採用した。
- 200 m昇降した際のデータより、最高速度は40 km/h、上昇距離は180 mと推定された(図3)。
- 200 m走行時:上昇22秒、最高地点で停止9秒、下降54秒、合計85秒の昇降を実現(図3)。
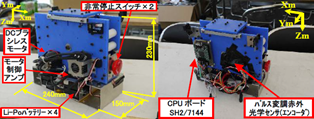
図1 開発したメイセイスペースエレベーターⅠの概要
重量: 3.2 kg 、昇降速度:50 km/h、駆動:交差ローラ方式、DCブラシレスモータ、バッテリー4個
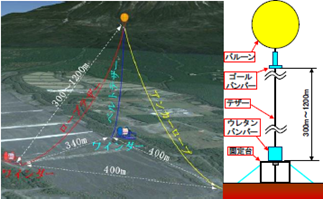
図2 第4回 宇宙エレベーター技術競技会の概要
上空のバルーンからテザー(ケーブル)を垂らし、300 ~1200 mまで上昇・下降することが課題
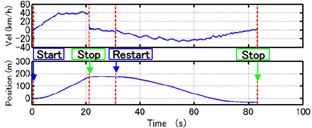
図3 昇降トライアル(200 m)時の速度と位置の解析結果
最高速度約40 km/h、最高到達地点が約180 m
応用例・用途
- 自動昇降クライマーの機構及び制御系は、各種のロボット開発技術に適用できる。