マニピュレータによる熱源探索法の開発~遠隔操縦型レスキューロボットへの適用~
整理番号:2016-030

研究者名: 山崎 芳明(Yoshiaki Yamazaki)
所 属: 理工学部 総合理工学科 機械工学系 教授
専門分野:ロボット工学、機械力学・制御、知能機械学・機械システム
キーワード:レスキューロボット、マニピュレータ、距離センサ、サーモグラフィー
研究概要
地震災害による被害を受けた建物内にて、探索を行う遠隔操縦型レスキューロボットは、倒れた家具、崩れた壁による障害物を乗り越えることは可能であるが、単体では、倒れた家具等による瓦礫内を探索することは困難である。そこで、ロボットにマニピュレータ注)を搭載することで、瓦礫にあいた隙間から内部に差し込しこむことにより、死角領域の探索が可能となる。我々は、マニピュレータ搭載レスキューロボットによる、迅速に被災者を発見する方法を考案した。
- マニピュレータの先端に装着した赤外線距離センサから得られる奥行情報をもとに、温度測定位置の推定を行い、小型サーモグラフィモジュールを利用して広範囲な温度分布図を作成し、熱源を特定する方法を採用した(図1)。
- 壁面の直方体熱源(約40℃、縦88×横64×奥行24 mm)までの奥行(z)を推定できた(図2、計算時間約0.5秒)。
- 奥行(z)が315 mm、415 mm、515 mmの場合、測定温度は約40℃であった。また、奥行が615 mmの場合は、解像度が低くなったが、壁面にある熱源を確認できた(図3)。
注):ロボットの腕や手に当たる部分のことで、作業を実行する時に使用する
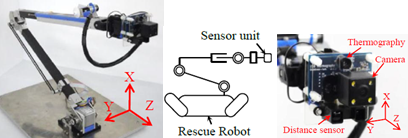
図1 マニピュレータ外観、マニピュレータ搭載レスキューロボット概略図、 及びセンサユニット外観(外観寸法:56.3×59.1×51.0 mm)魚眼カメラ、赤外線距離センサ、小型サーモグラフィモジュールを搭載
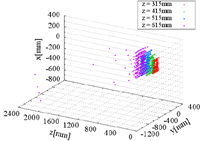
図2 赤外線距離センサでの壁面測定壁面にある熱源までの奥行を推定
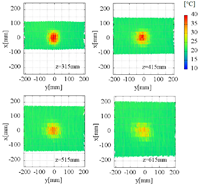
図3 推定壁面を基づいた温度分布図
応用例・用途
- 地震災害時の瓦礫内探索し、迅速に被災者を発見できるレスキューロボットに利用できる。
- 隙間内の熱源位置特定への応用も可能である。