遠隔操縦や自律移動できるロボットの開発とAI応用研究
整理番号:2019-009

研究者名: 山崎 芳昭(Yoshiaki Yamazaki)
所 属: 理工学部 総合理工学科 機械工学系 教授
専門分野: ロボティクス・メカトロニクス
キーワード:レスキューロボット、ROSを利用したロボット制御、Deep Learningによる物体認識
研究概要
本研究室では、遠隔操縦型ロボットや自律移動ロボットの研究、近年ではAIによる物体認識の応用研究に取り組んでいます。
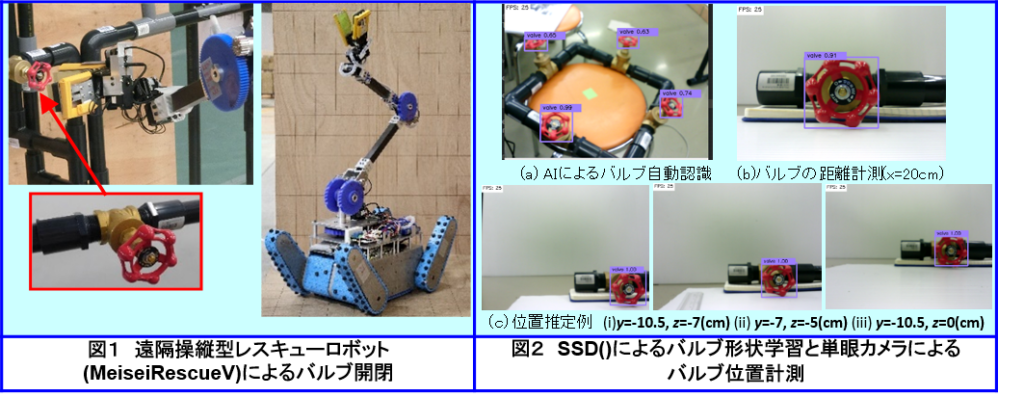
(1)遠隔操縦型レスキューロボットの開発…震災時に瓦礫の下に残された被災者を発見するレスキューロボットを開発し、毎年5月開催の「ロボカップ レスキュー実機リーグ」や経産省主権の「World Robot Summit(ワールドロボットサミット)」で国内外の大学などと競い実験評価している(図1参照)。
(2)SSD(Single Shot Multibox Detector) を用いたバルブの自動認識…バルブをSSDを用いて機械学習させ、マニピュレータ搭載の単眼カメラで認識し、距離や位置も自動計測する手法を研究している(図2参照)。
(3)レスキューロボット搭載用自律マニピュレータの研究…上記の手先位置の座標を基に、ROS(Robot Operating System)とMoveIt!を組み合わせ、バルブの自動開閉を実現している。(代表論文 1)参照)
応用例・用途
■ 各種ロボットの技術開発(レスキューロボット、マニピュレータ、自律移動ロボット、AI応用画像認識など)
■ エレベーターなどの各種振動問題に関する技術相談(メーカ勤務時に研究開発に従事)
特記事項
●代表論文
1) A Hayato HAGIWARA, and Yoshiaki YAMAZAKI,”Autonomous valve operation by a manipulator using a monocular camera and a single shot multibox detector”, The IEEE International Conference on Safety, Security, and Rescue Robotics (SSRR2019), Wurzburg,0055_FI_pp.1-6, September, 2019.